Zivid 2+
Zivid 2
Software
Get Started
Industries
Get Started
Support
Downloads
Customers
Zivid 2+
Zivid 2
Software
Get Started
Industries
Get Started
Support
Downloads
Customers

.svg "Zivid")




In version 1.6 of the Zivid SDK, we released a new feature, the 3D hand-eye calibration API.
That might trigger questions like:
Want to go more in-depth? Join us for the webinar "Achieving Optimal Hand-Eye Calibration for Enhanced Robotics Performance":

Even if you don't think about it, you use hand-eye calibration every day. All the tasks you solve with your hands, from picking objects of all textures and sizes to delicate dexterity tasks, like for instance sewing, involves that your hands and eyes are correctly calibrated.
Four main contributors are enabling us to master such tasks:
So, what can happen if our hand-eye calibration is wrong?
In this video from Good Mythical Morning, they compete in performing a simple task of pouring water into a bottle, using glasses that flip-the-world upside down.
As you can see, they are struggling to fill the bottle because they need to recalibrate years of hand-eye calibration on the fly. Their hand-eye calibration is not working anymore because their eyes and arms no longer are collaborating in the same coordinate system.
We now understand that when you pick up an object:
This brings us to what hand-eye calibration means for robot applications.
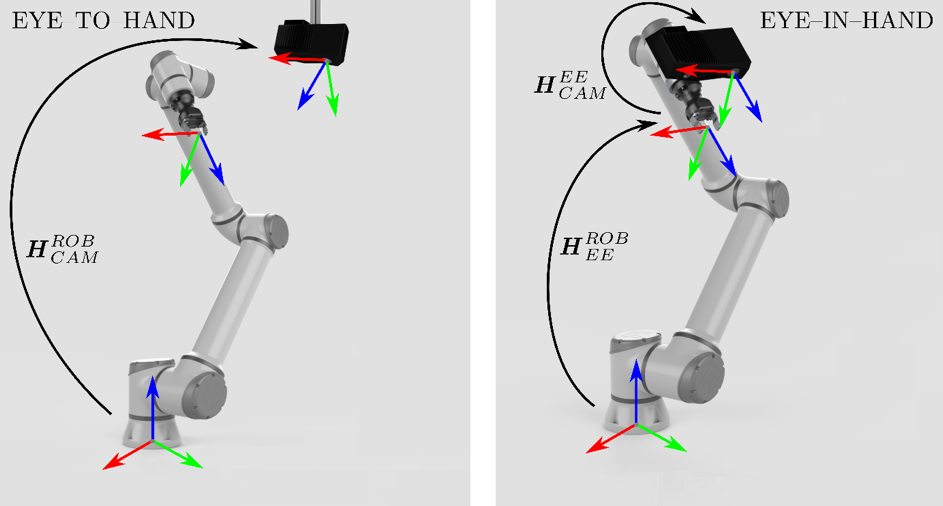
There are 2 branches of hand-eye calibration, both supported in Zivid’s hand-eye calibration API.


In many applications, especially robot driven, hand-eye calibration is a must. Not only does it simplify the integration drastically, but it will often increase the accuracy of the application.
Assume you have placed your target objects in a bin, with a Zivid 3D camera mounted over it, and your robot with a gripper next to the bin. After performing an eye-to-hand calibration, a 3D bin-picking sequence could look like this:
Hand-eye calibration is the binding between the robot and the camera, which makes it easy to understand why having an accurate hand-eye calibration is essential to solving the automation task. With a high-accuracy 3D camera, you only need a snapshot to know the target object’s position in space before successfully picking it.
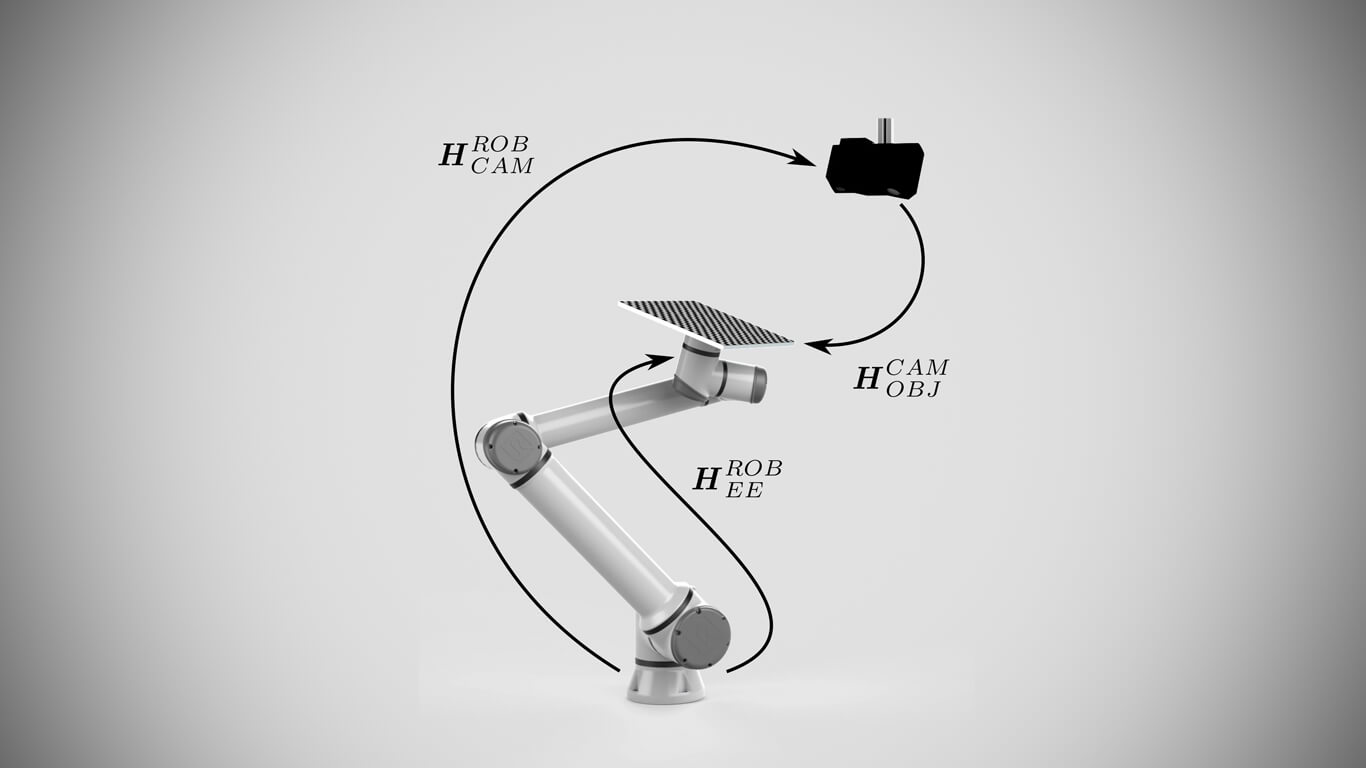
A hand-eye calibration is a minimizing scheme using robot- and corresponding camera poses. Robot poses are read directly from the robot, while camera poses are calculated from the camera image.
A common way to perform this calibration originates from 2D cameras, using 2D pose estimation. Simplified, you capture images of a known calibration object, calibrate the camera, and estimate 2D to 3D poses.
Anyone that tried camera calibration knows that this is hard to get right:
While neither step is trivial, step two is especially challenging. Even the most experienced camera calibration experts will agree. At Zivid we factory calibrate every single 3D camera, and have dedicated thousands of engineering hours to ensure accurate camera calibration.
So the question is, should you recalibrate the 2D camera and estimate 2D to 3D poses when your 3D camera already provides highly accurate point clouds?
Well, the short answer is: probably not.
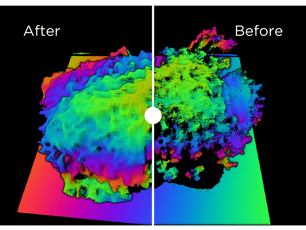
Zivid’s hand-eye calibration API uses the factory calibrated point cloud to calculate the hand-eye calibration. Not only does this yield a better result, it does so with fewer positions. And more importantly, the result is repeatable and easy to obtain.
The following graphs show typical rotational- and translation errors as a function of the number of images used per calibration.
As you can see, a typical calibration improvement is 3x enhancement in translation error and 5x in rotational error.
Regardless of your prior knowledge to hand-eye calibration, we hope you found this topic interesting. As you see, hand-eye calibration is one of the essential factors when working with 3D vision and robots. Zivid’s 3D hand-eye calibration makes the calibration process more accessible and reliable.
Want to know more? Join us for the webinar "Achieving Optimal Hand-Eye Calibration for Enhanced Robotics Performance":
Read more about how you can perform hand-eye calibration using Zivid One+ 3D cameras, additional info, code samples, and step-by-step guides in the Zivid knowledge base.


No Comments Yet
Let us know what you think